插上仿生科学的翅膀,新型合页式夹板可为关节提供稳固支持和最大灵活性
德国基尔 2021年2月12日
受到蜻蜓翅膀的启发,一支德国石荷州基尔大学的科研团队研发出了可用于运动康复和医学治疗的新型关节夹板。
.JPG)
大约80%的运动损伤都是发生在人体运动器官的所谓骨骼肌肉性伤害,例如扭伤、拉伤、挫伤或过度劳损等。在手球、篮球和举重等需要手部关节承受较大负荷的运动种类中,运动员经常会遭受此类的损伤,特别是在腕关节。常用的绷带缠绕方法往往或是不能提供足够的稳定性,或是过于限制手部的活动。近期,来自基尔大学(CAU)动物学学院的一支科研团队开发出了一种新型的活动关节夹板,可以同时为伤处提供足够的稳定性和最大的灵活性。设计这一结构的关键性启发来自薄薄的蜻蜓翅膀——蜻蜓在飞行时,它的翅膀必须承受巨大的外部力量。2月11日,团队在专业期刊《应用物理学A》(Applied Physics A)上发表了这一研究成果。接下来,他们希望可以将此设计投入实际应用并已为此申请了专利。
蜻蜓翅膀的独特特质带来启发

科学家们最初的研究对象原本是蜻蜓翅膀那令人着迷的特质:为了对抗不同的气流并经得起与固态物体的碰撞,它的翅膀必须足够牢固又足够灵活。“在大自然中可以广泛的观察到这样的组合,可在技术领域,一般来说我们很难将支撑的稳固性和活动的灵活性同时实现”,此次科研的第一作者Ali Khaheshi如此解释到。这位工程师与材料科学家正面临着他在Stanislav Gorb教授与Hamed Rajabi博士所带领的“功能性形态学与生物力学”工作组中的博士毕业。他们在此共同研究,蜻蜓究竟是如何将两种特质完美结合在一起的。
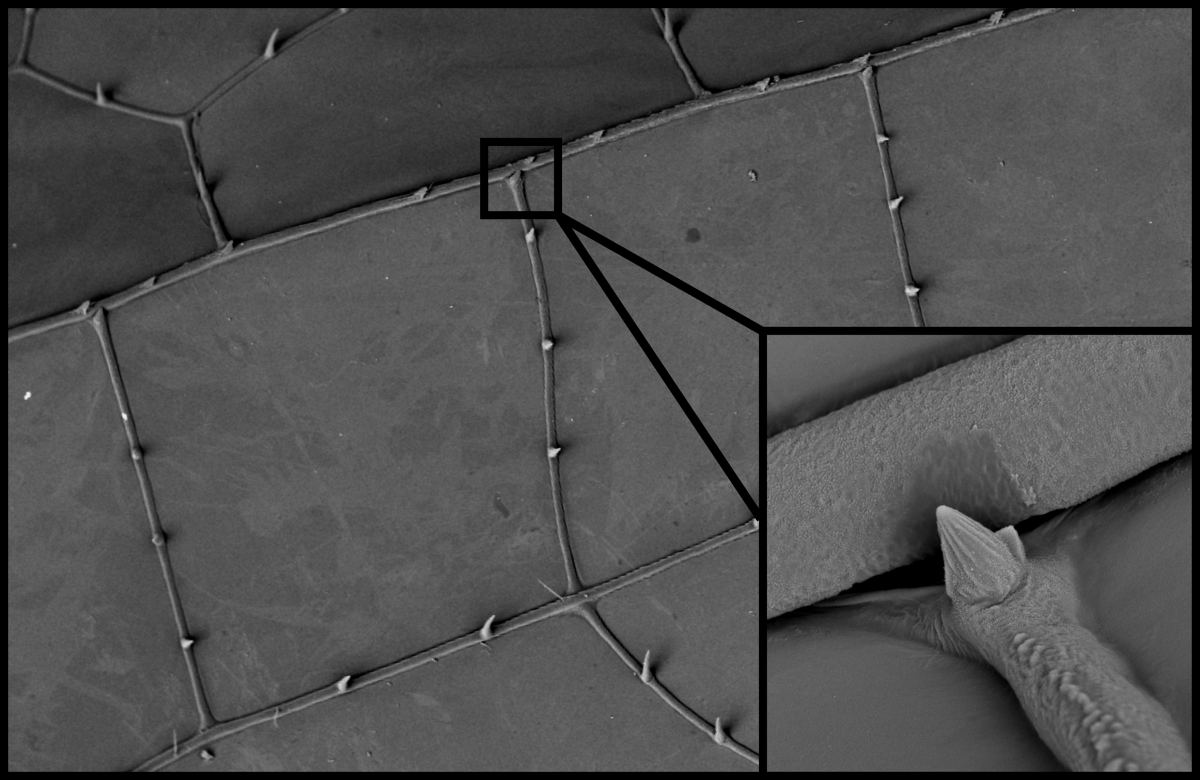
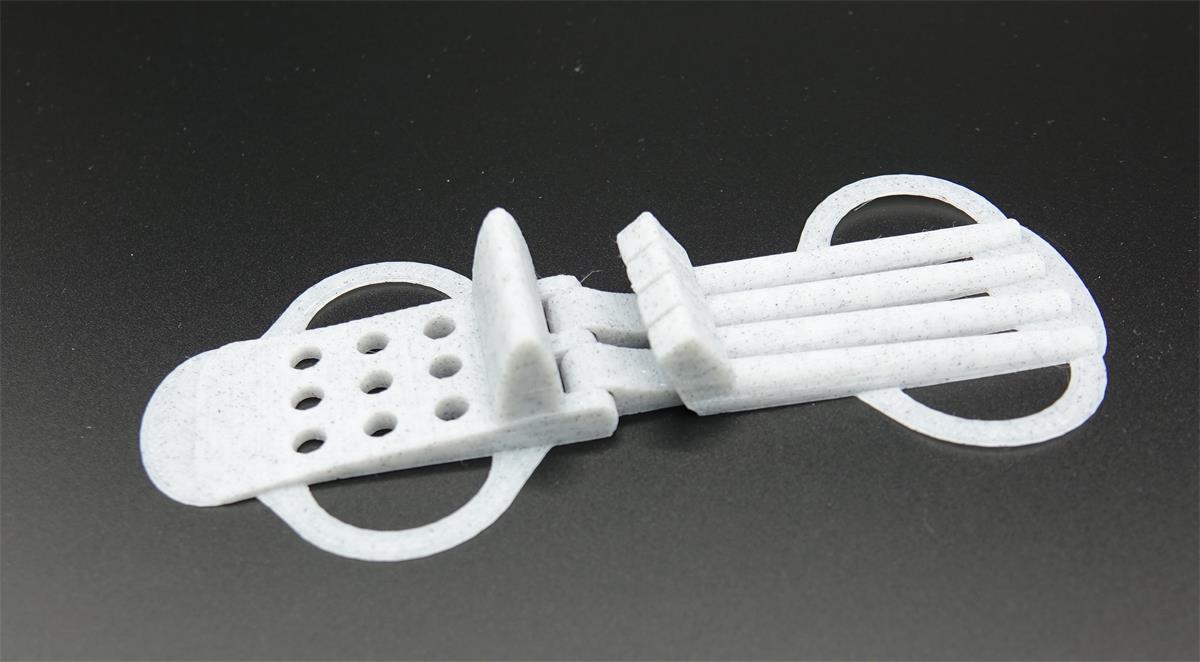
来自生物学的研究结果为我们寻求技术层面的解决方案带来了令人激动的灵感:蜻蜓的‘成功秘诀’在于它翅膀上那些细微的、如同关节一般的连结点“,Gorb教授进一步解释到。蜻蜓翅膀的表面被由节肢弹性蛋白构成的线束贯穿,这保证了它移动的灵活性。而当其延展角度将要超出一定范围时,同样分布在翅膀表面的刺状”限位器“为阻挡进一步的移动。同时,这些微小的刺会对翅膀提供支撑并提供足以让其对抗外部压力的稳定性。”当我们团队中的一名成员谈起他由于运动损伤而不得不忍受腕关节疼痛的时候,我们敏感的意识到,一个受到蜻蜓翅膀启发的设计可能会有所帮助“,Rajabi博士说到。为了将源于大自然的”设计“转化为实际中灵活且坚固的手部固定装置,科学家们研发了一种由聚乳酸(PLA)制成的合页结构。通过他们的特殊设计,这个由具有延展性的轻质材料制成的结构仅重23克,并且可以与日常使用的弹性织物绷带捆绑组合使用。当手腕弯曲超过70°——这也是腕关节在举重时候的弯折角度,合页结构上的限位器会阻止手部的进一步活动并提供给腕关节足够的支撑——这就如同蜻蜓翅膀上的那些小刺所起到的作用一样。
可以投入医学和机器人领域的实用
利用一台特殊的测试设备,科研团队研究了他们的关节夹板对于压力的承受状况;结果表明,它可以承受320牛的外力。“这意味着,最多可以支撑32公斤的重量,即超过它自重的1400倍。而如果用比聚乳酸更坚硬的材质制作夹板,那它甚至可以支撑最多450公斤——这比人类举重的世界纪录还要多“,Khaheshi补充说。通过3D打印工艺,人们可以以相对低廉的成本生产这款夹板,并且它可以适用于手部、肘部和膝部关节。医疗领域的应用也是可行的,比如在受伤后需要将养关节部位的情况下。此款设计的另一个优势在于它的可控性:”与受压时会逐渐变得僵硬的非线性机械弹簧不同,我们可以有针对性的、无延迟的让夹板在‘活动模式’和‘稳固模式’之间切换“,Rajabi博士这样说。这也让此技术投入机器人领域的使用变得可行。

寻找工业化伙伴
现在,科研团队希望找到可以对他们的关节夹板进行适应性改良并随后将其投放市场的企业伙伴,例如将其作为织物绷带的内嵌组成部分。他们已经为这款设计申请了专利。“生物系统往往比人们第一眼看上去的感觉要复杂的多。由此它们可以通过它们各种独一无二的特征提供给我们在其他领域中学习并应用的新思路“,Khaheshi对于他在生物力学领域的研究兴趣做了如是总结。
论文原著:
Khaheshi, A., Gorb, S.N. & Rajabi, H. Spiky-joint: a bioinspired solution to combine mobility and support. Appl. Phys. A 127, 181 (2021). https://doi.org/10.1007/s00339-021-04310-5
专利信息: DE102020112003.6
图片来源:© Ali Khaheshi;© Stanislav Gorb;© Hamed Rajabi
 Deutsch
Deutsch